Abstract: A new type of ultrasonic sensor is used to design and develop an obstacle avoidance navigation system for an unknown environment based on a wheeled mobile robot platform based on ARM9 and embedded Linux. This article focuses on the realization principle of the ultrasonic sensor, the entire software realization process in the robot platform and the realization method of controlling the robot walking.
1 Introduction
In the project development, the SRF05 ultrasonic sensor imported from the United Kingdom is used. Its echo feedback and ranging methods are special compared with the commonly used ultrasonic sensors. It is also slightly difficult to implement in ARM, but the sensor has a high accuracy of 1cm Therefore, the infrared distance measurement module used for short-distance distance measurement is removed by the sensor, and hardware resources are saved.
The minimum system of the robot is, touch screen module, ultrasonic module, camera image acquisition module, DC motor closed-loop control system, ranging is the most important part in the whole system, it directly affects the accuracy of the motor running distance, in the effective range Image acquisition control within. The entire system is completed in the ARM9 and Linux platforms, and each module is implemented in a device-driven manner to make the module control more convenient.
2 SRF05 ultrasonic ranging method
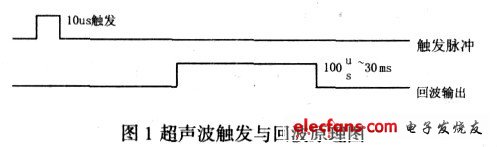
Provide a 10us pulse to trigger the ultrasonic sensor. SRF05 will send 8 cycles of overclocking pulses with a frequency of 40khz. At this time, the echo level on the echo port becomes high. At this time, the timer starts timing. Low level proves that there is an obstacle to stop timing at this time, and the width of the high pulse is proportional to the distance measured. The effective range of the ultrasonic wave is 1cm ~ 4m. When it becomes low level, the time of the timer is 30ms, so the period of the timer should be greater than 30ms during the distance measurement in order to effectively measure the distance.
The principle is shown in Figure 1.
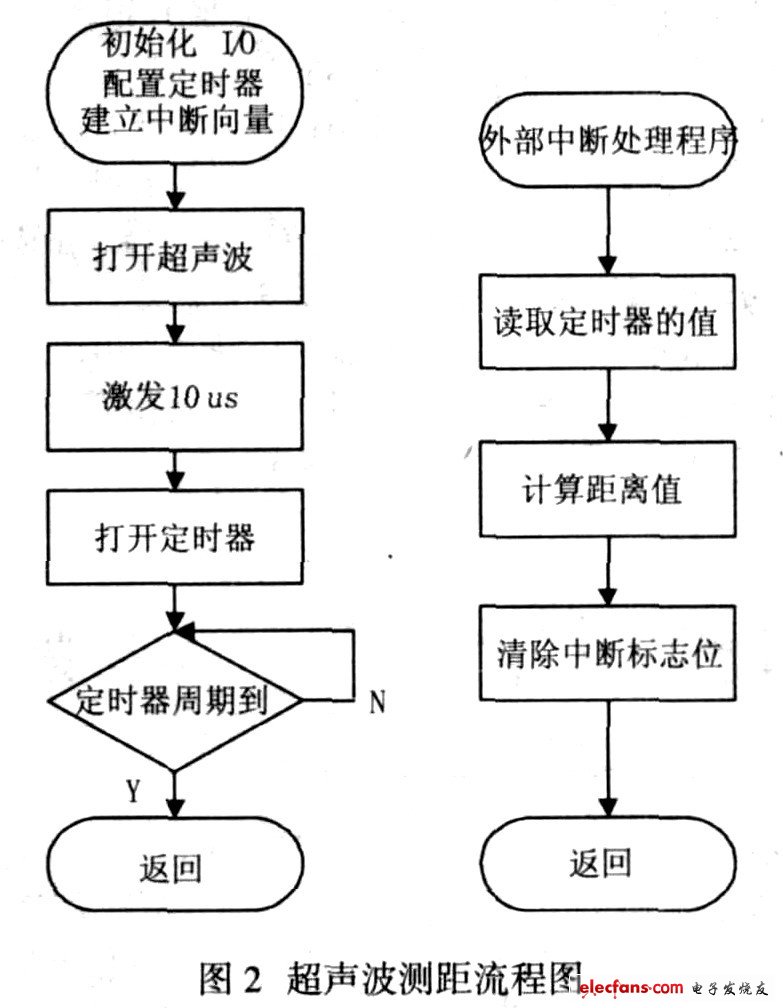
3 Ultrasonic ranging software implementation
Figure 2 is a flow chart of ultrasonic ranging.
4.2Mm Ribbon Connector,Strip Connectors,Strip Terminal,Strip Connector
YUEQING WEIMAI ELECTRONICS CO.,LTD , https://www.weimaicarconn.com