01
What is a stepper motor?
Stepping motor is an open-loop control motor that converts electrical pulse signals into angular displacement or linear displacement, also known as pulse motor. In the case of non-overload, the speed and stop position of the motor only depend on the frequency and number of pulses of the pulse signal, and are not affected by load changes. When the stepper driver receives a pulse signal, it can drive the stepper motor to rotate a fixed angle in the set direction, which is called the "step angle".
The rotation of the stepper motor runs step by step at a fixed angle. The angular displacement can be controlled by controlling the number of pulses to achieve accurate positioning. At the same time, the speed and acceleration of the motor rotation can be controlled by controlling the pulse frequency. So as to achieve the purpose of speed regulation. Stepper motors are mostly used in peripheral equipment of digital computers, as well as printers, plotters and disks.
02
Features of stepper motor:
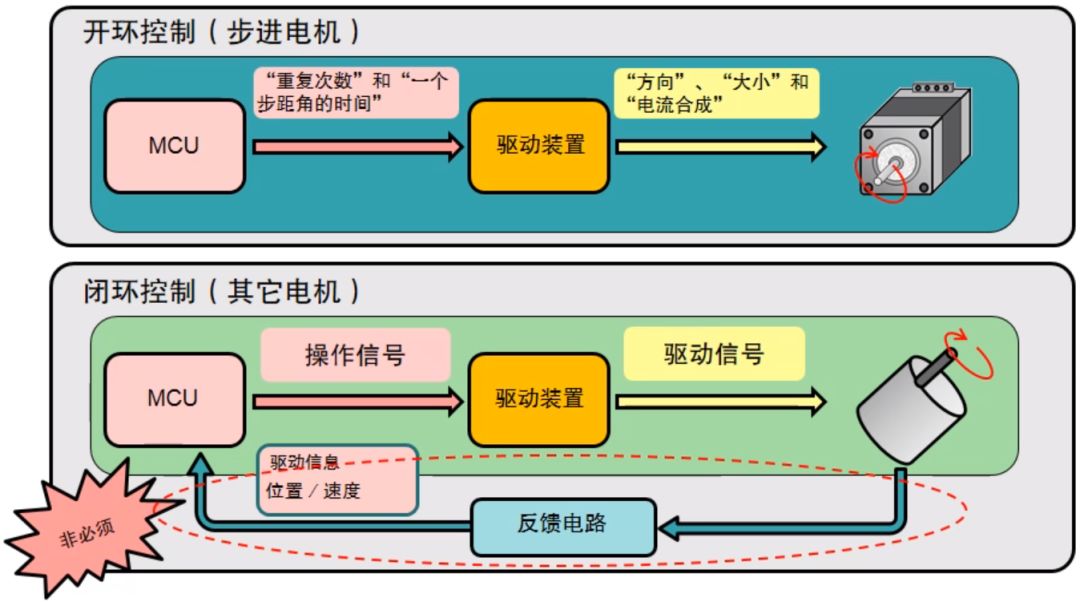
The position and speed signals of the stepping motor when it is working are not fed back to the control system. If the position and speed signals when the motor is working are fed back to the control system, then it belongs to the servo motor. Compared with the servo motor, the control of the stepper motor is relatively simple, but it is not suitable for the occasions with higher precision requirements.
The advantages and disadvantages of stepping motors are very prominent. The advantages are simple control and high precision. The disadvantages are noise, vibration and efficiency. It has no cumulative error, simple structure, convenient use and maintenance, and low manufacturing cost. The stepper motor has a large ability to drive the load inertia. It is suitable for small and medium-sized machine tools and places where speed accuracy is not high. The disadvantages are low efficiency, high heat generation, and sometimes "out of step". The advantages and disadvantages are as follows.
advantage
1. The operation of the motor is easy to control by inputting the pulse signal to the motor;
2. No feedback circuit is needed to return the position and speed information of the rotating shaft (open loop control);
3. Achieve greater reliability due to no contact with the brush.
Disadvantage
1. Need pulse signal output circuit;
2. When the control is not appropriate, synchronization loss may occur;
3. Heat is generated due to the current still existing after the rotating shaft stops.
03
Classification of stepper motors:
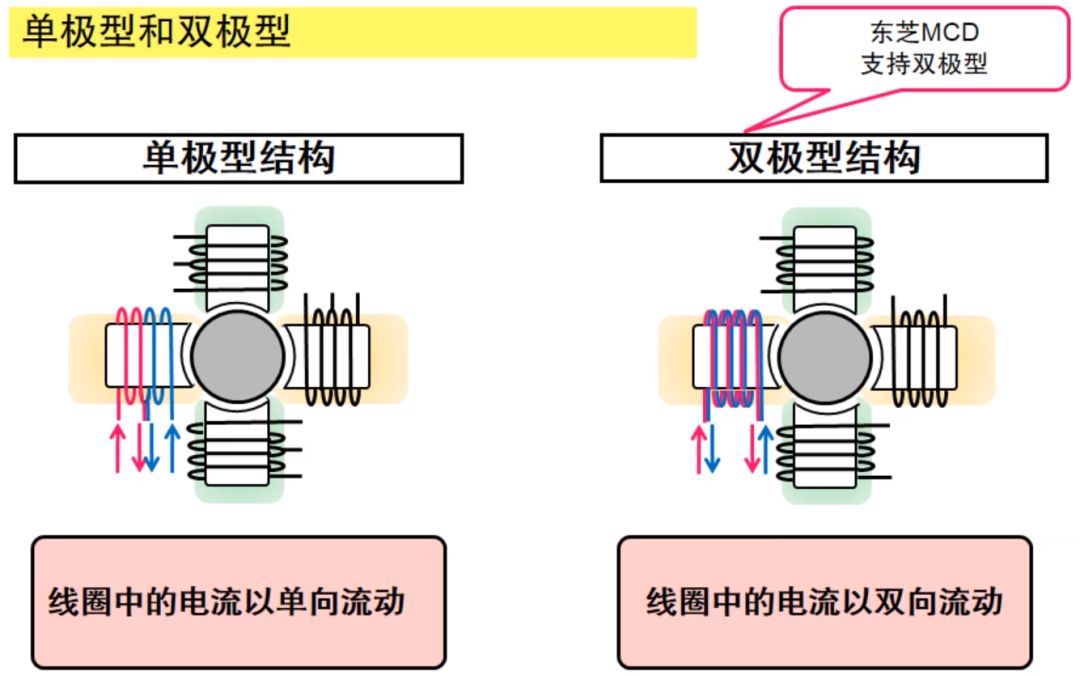
Under the condition of the same current and the same torque output, the unipolar stepper motor has twice the coil than the bipolar stepper motor, and the cost is higher. The structure of the control circuit is different. At present, most of the popular ones on the market are Bipolar stepping motor.
Stepper motors are usually classified according to rotor characteristics and stator windings in structure. The classification of these two types will be described in detail below.
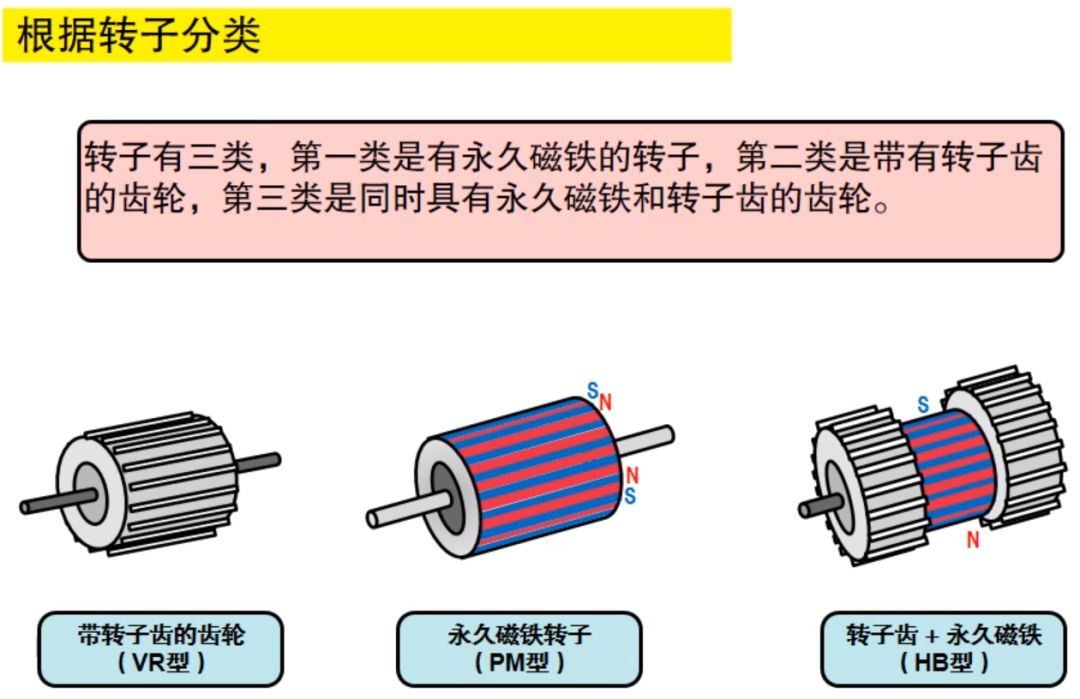
According to the classification of rotors, there are three main types: reactive (VR type), permanent magnet (PM type), and hybrid (HB type).
Reaction formula
There are windings on the stator, which are composed of soft magnetic materials. Its simple structure, low cost, small step angle, up to 1.2 degrees, but poor dynamic performance, low efficiency, high heat generation, and reliability is difficult to guarantee.
Permanent magnet
The rotor of the permanent magnet stepping motor is made of permanent magnet material, and the number of poles of the rotor is the same as that of the stator. Its characteristics are good dynamic performance and large output torque, but this kind of motor has poor degree and large step angle (generally 7.5 degrees or 15 degrees).
mixed type
Hybrid stepping motors combine the advantages of reactive and permanent magnets. There are many phase windings on the stator, permanent magnet materials are used on the rotor, and both the rotor and the stator have multiple small teeth to improve step accuracy. Its characteristics are large output torque, good dynamic performance, and small step angle, but its structure is complex and the cost is relatively high.
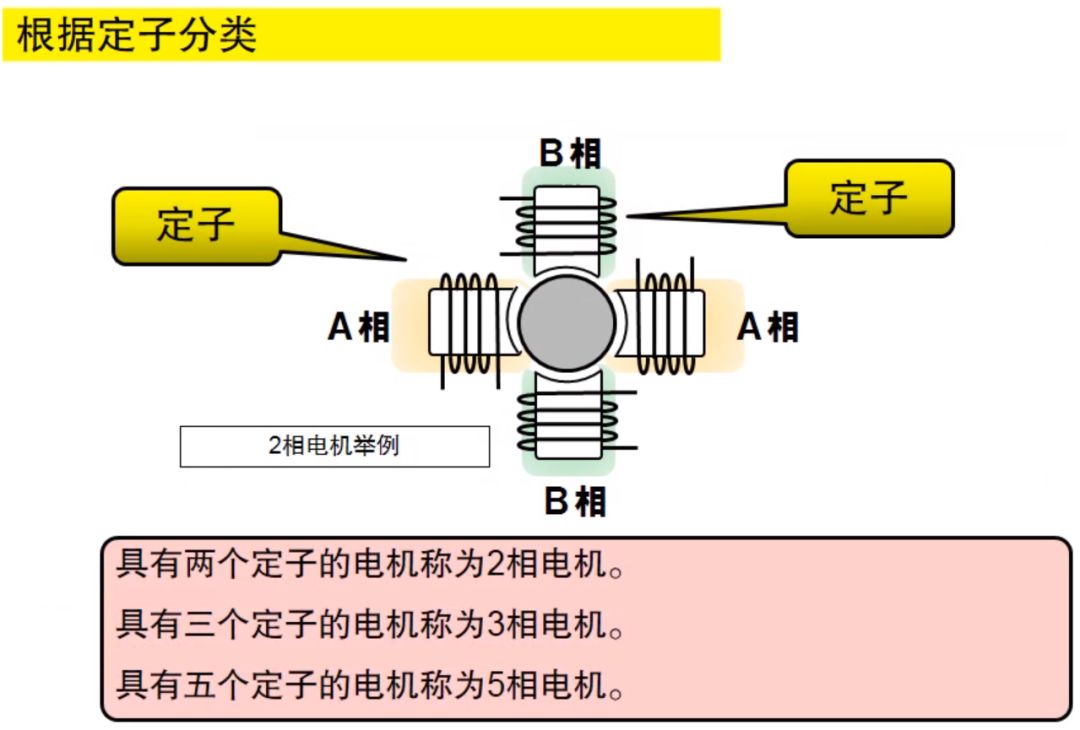
Stepper motors are classified according to the windings on the stator. There are two-phase, three-phase and five-phase series. At present, the most popular is the two-phase hybrid stepper motor, which accounts for more than 97% of the market share. The reason is that it is cost-effective, and the effect is good with subdivision drivers.
The basic step angle of this kind of motor is 1.8 degrees per step. With a half-step driver, the step angle is reduced to 0.9 degrees and a subdivision driver is installed. The step angle can be subdivided up to 256 times (0.007 degrees/microstep). Due to friction and manufacturing accuracy, the actual control accuracy is slightly lower. The same stepping motor can be equipped with different subdivision drivers to change the precision effect.
04
The working principle of stepper motor:
The stepping motor is controlled by pulse signals. Each time a pulse signal is input, the stepping motor takes one step forward. The step angle of stepping motor rotation is produced by proportional control based on the structure of the motor. If the subdivision control of the control circuit is unchanged, the step angle of stepping rotation is theoretically a fixed angle. In actual work, there will be a slight difference in the step angle of the motor rotation, which is mainly caused by the fixed error of the motor structure, and this error will not accumulate.
The greater the total number of poles of the stepper motor, the higher the machining accuracy requirements. Generally, the step angle of an industrial hybrid stepping motor is 1.8 degrees, which is 200 poles.
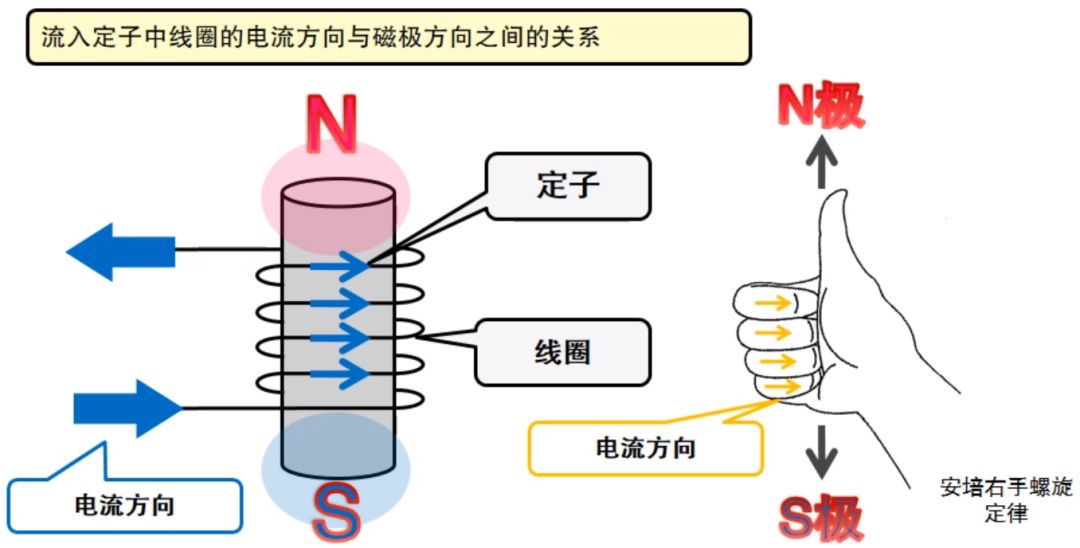
The phase current and magnetic field of the stepper motor follow the ampere right-handed spiral law. The magnetic field energy is generated by electric energy and the phase current of the motor is controlled. The magnetic pole direction of the motor stator can be reversed. The changes of the two-phase magnetic field cooperate to produce the motor Spin.
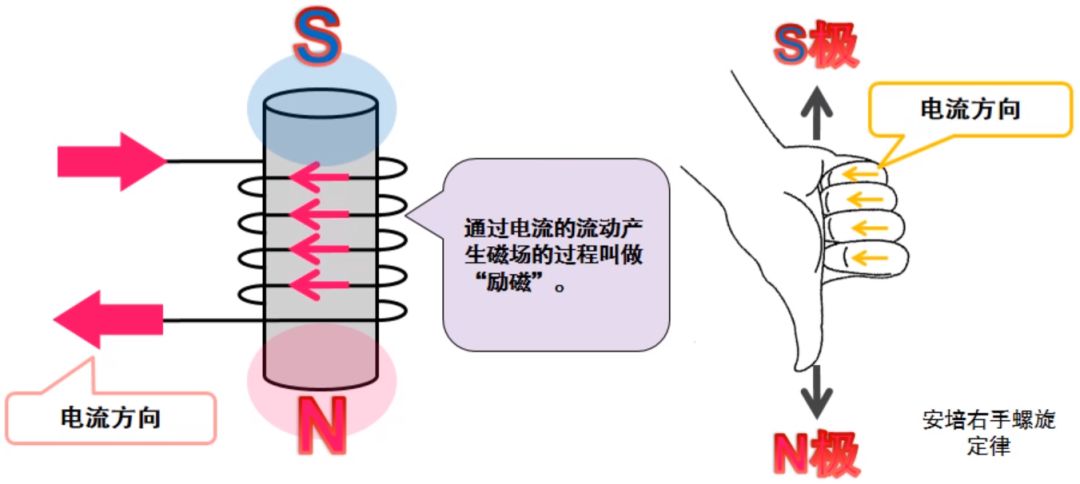
If the direction of the current changes, the direction of the magnetic poles will also change. The process by which the current of the stepper motor flows through the stator to generate a magnetic field is called excitation.
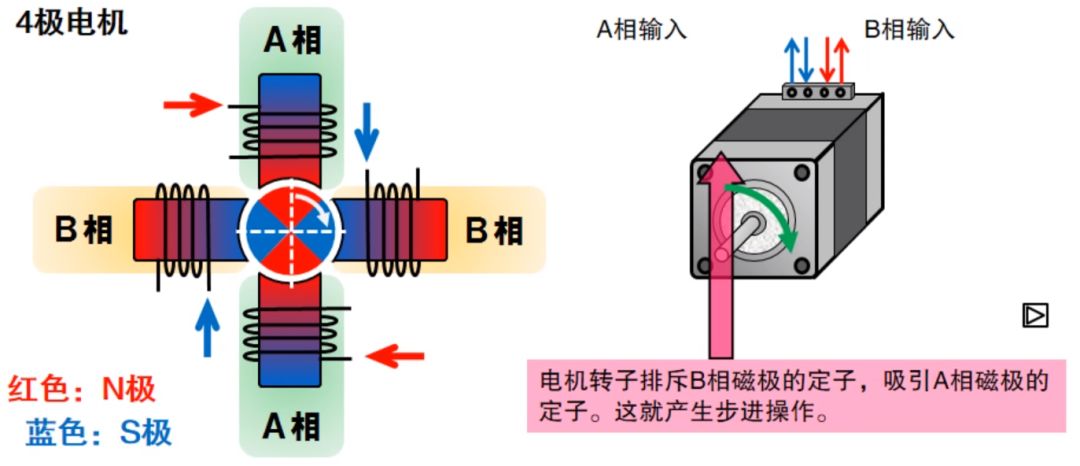
In the so-called two-phase stepper motor, the rotation of the rotor of the motor is realized by the repulsion and attraction of magnetic fields of different magnetic poles. As shown in the figure above, the A phase generates an N pole magnetic field to attract the S pole of the rotor, and the B phase generates an S pole magnetic field to attract the N pole of the rotor, so that the stator generates rotating power. If the current direction of the A and B phase stator coils is changed, the motor will produce another step of rotation. Continuously changing the current direction of the A and B phase stator coils, the motor will produce continuous rotation.
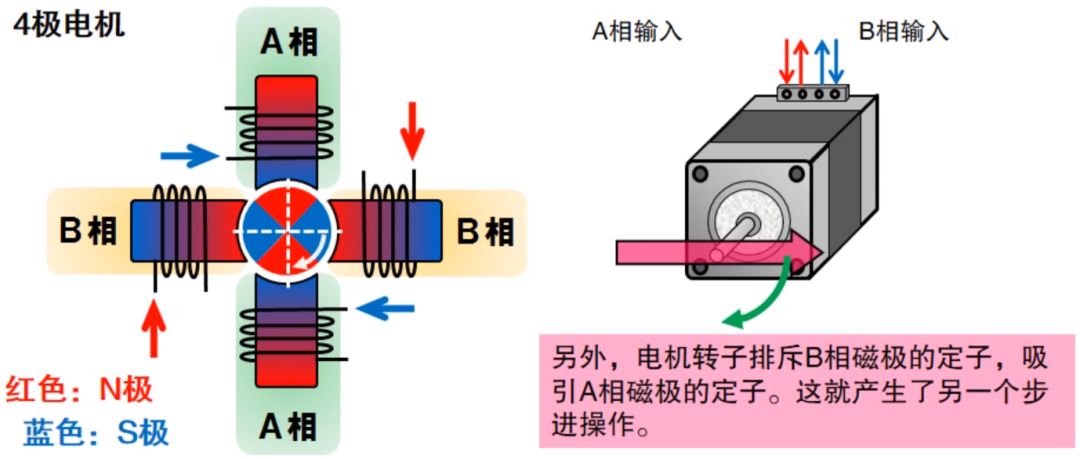
As shown in the figure above, the movement of the motor is realized by changing the flow of current in the motor. The electronic rotor repels the stator of phase B magnetic poles and attracts the stator of phase A magnetic poles, which creates another stepping operation.
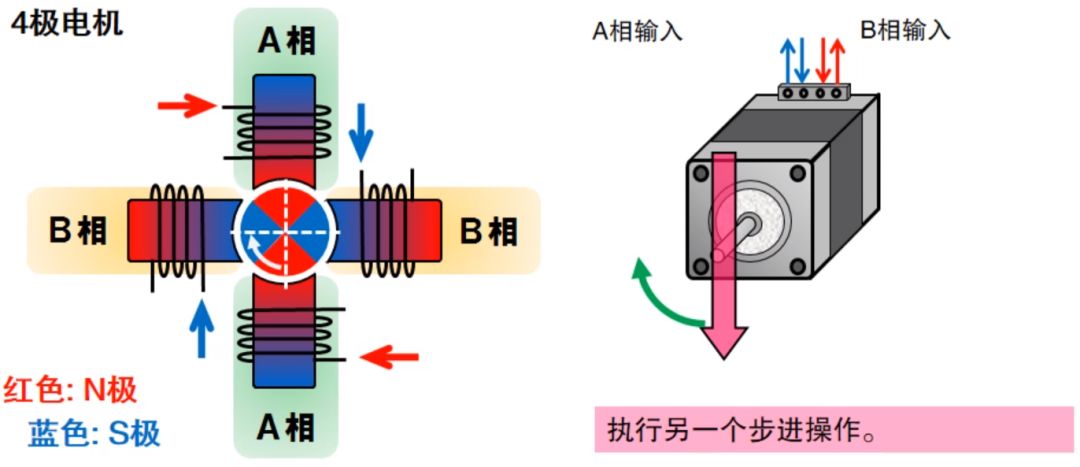
Perform another stepping operation, the motor stator poles are reversed, the rotor repels the B-phase magnetic pole stator and attracts the A-phase magnetic pole stator, as shown in the figure above.
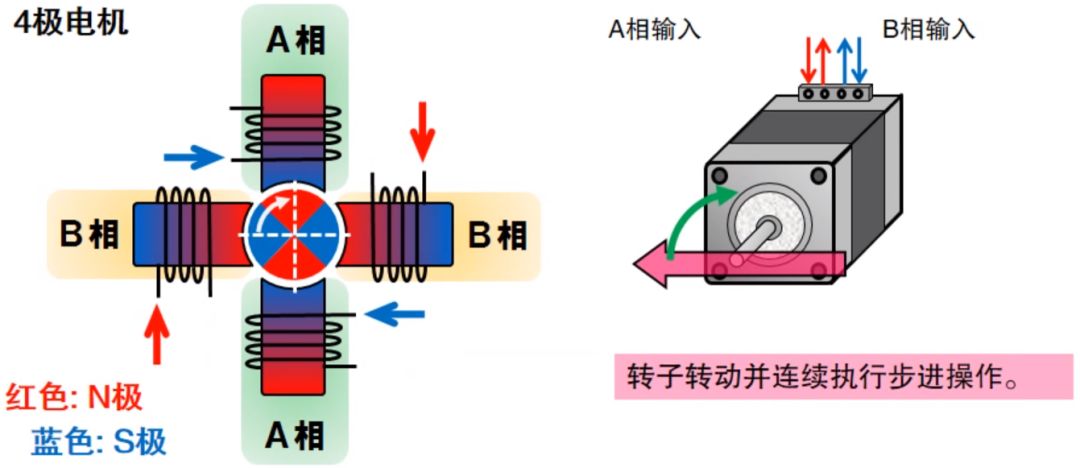
As shown in the figure above, whenever the direction of current in the stator coil changes, the magnetic poles will reverse and the rotor repeats the stepping operation. Toshiba's stepping motor drive control circuit controls the motor's magnetic field excitation through pulse width modulation, which can achieve efficient and stable operation of the motor.
ZGAR Aurora 3000 Puffs
ZGAR electronic cigarette uses high-tech R&D, food grade disposable pod device and high-quality raw material. All package designs are Original IP. Our designer team is from Hong Kong. We have very high requirements for product quality, flavors taste and packaging design. The E-liquid is imported, materials are food grade, and assembly plant is medical-grade dust-free workshops.
Our products include disposable e-cigarettes, rechargeable e-cigarettes, rechargreable disposable vape pen, and various of flavors of cigarette cartridges. From 600puffs to 5000puffs, ZGAR bar Disposable offer high-tech R&D, E-cigarette improves battery capacity, We offer various of flavors and support customization. And printing designs can be customized. We have our own professional team and competitive quotations for any OEM or ODM works.
We supply OEM rechargeable disposable vape pen,OEM disposable electronic cigarette,ODM disposable vape pen,ODM disposable electronic cigarette,OEM/ODM vape pen e-cigarette,OEM/ODM atomizer device.

Aurora 3000 Puffs,Pod System Vape,Pos Systems Touch Screen,Empty Disposable Vape Pod System,3000Puffs Pod Vape System
ZGAR INTERNATIONAL(HK)CO., LIMITED , https://www.szdisposable-vape.com